Этот сайт больше не обновляется. Сайт К. Полякова «Преподавание, наука и жизнь»
переехал по адресу kpolyakov.spb.ru.
Новый адрес страницы, к которой вы обратились:
Пожалуйста, обновите свои закладки. Через 5 секунд вы будете перенаправлены
на новый сайт автоматически.
Робототехника
Что это такое?
Робототехника — новое интересное направление, которое,
по-видимому, будет дальше развиваться в рамках школьных курсов информатики и
технологии. Бум робототехники во многом связан с тем, что она позволяет
ответить на вопрос: »А зачем же мы, собственно, учим программирование?».
Кроме того, в курсе робототехники можно познакомиться с элементарными
понятиями теории автоматического управления.
На этой странице представлены разработанные автором тренажёры для
программирования LEGO-роботов и платы Arduino.
Они могут помочь в тех случаях, когда по каким-то причинам нет возможности
использовать реальное аппаратное обеспечение.
Тренажёры используют возможности HTML5, поэтому
будут работать только в современных браузерах (лучше всего использовать
Google Chrome или Mozilla Firefox).
Для управления роботами в тренажёрах используется простой язык программирования,
который получил рабочее название SiRoP (Simple Robot Programming).
Как известно, есть два способа управления — непосредственное
управление (с пульта) и управление по программе, заранее записанной в память
устройства. Этот тренажёр позволяет познакомиться с непосредственным управлением.
Можно установить мощности каждого из двух моторов отдельно (или одинаковые мощности для
обоих моторов), а затем нажатием на кнопки пульта включать и выключать моторы,
перемещая робота.
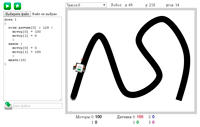
Датчик освещённости позволяет роботу ориентироваться на
поверхности стола, например, ехать вдоль границы между белой и чёрной областями
(по краю чёрной линии). Фотодиод подсвечивает поверхность, фотоприёмник «ловит»
отражённые лучи и измеряет их интенсивность.
Наиболее популярная задача этого типа — движение по линии. С помощью тренажёра
можно изучить различные законы управления — релейный, пропорциональный, и
даже ПИД-управление (пропорционально-интегрально-дифференциальное).
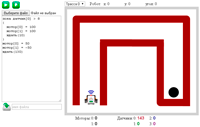
Управление роботом с датчиком расстояния (сонаром)
Датчик расстояния (сонар) позволяет во время движения робота
определить расстояние до ближайшего препятствия. Он излучает ультразвуковой сигнал
и принимает отражённый сигнал. Чем больше время между излучённым и принятым сигналами,
тем больше расстояние.
Используя датчик расстояния, можно запрограммировать робота так, что
он автоматически пройдёт лабиринт известной формы, но неизвестных размеров.
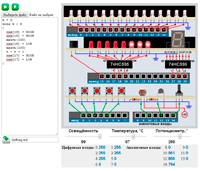
Плата Arduino позволяет непрофессионалам
создавать и программировать простые устройства на микроконтроллерах.
С её помощью можно изучать работу цифровых и аналоговых портов ввода и вывода,
принимать сигналы от датчиков и управлять работой приводов и индикаторов.
С помощью тренажёра вы можете »помигать« лампочками различных цветов,
разработать свою систему звуковой сигнализации, изучить работу сдвигового регистра
и семисегментного индикатора, поэкспериментировать с датчиками освещённости
и температуры.



")





